

随着人工智能(AI)、5G和物联网(IoT)等技术的发展,人与智能机器人的共存共生已经悄然出现。在这种共存共生中,智能机器人需要准确地“了解”环境和预期影响,才能有效地执行任务。这种理解涉及解决智能机器人一系列理论和技术问题,如环境感知、环境建模、空间推理和计算。而同步定位与映射(SLAM)作为智能机器人环境检测和感知的关键技术之一,对于实现智能机器人的理解和应用起着重要作用。
目前,大多数主流SLAM算法仅在静态环境中稳定运行。而现实世界是动态变化的,不仅包括短期变化,如移动的汽车和行人,还包括长期变化,如季节变化或昼夜变化引起的环境变化。这种动态变化的环境对SLAM的各个模块提出了新的挑战,例如姿势估计、特征提取和跟踪以及地图构建。为了解决动态环境中的SLAM问题,最常用的原则是识别、跟踪和处理动态元素。
微美全息(NASDAQ:WIMI)将语义信息和激光雷达技术融合到SLAM算法的研究中,探索动态环境下基于激光雷达的语义分割SLAM算法。通过进行语义分割,可显示环境中潜在的运动对象,有助于SLAM算法在特征跟踪和映射模块中过滤出运动对象,从而获得更准确的姿态估计结果。语义信息被认为是机器人从感知智能走向认知智能的重要信息。语义SLAM是将语义信息集成到环境表示中的一种重要方法。
基于激光雷达的语义分割SLAM算法首先利用空间注意网络对点云进行语义分割。全卷积神经网络可以对点云数据进行高效的特征提取和分类,从而实现对环境中不同物体和背景的分割。通过语义分割,我们可以得到关于运动对象的信息,这有助于在后续的特征跟踪和地图构建过程中过滤出运动对象,从而提高姿态估计的准确性。此外,为了更好地处理动态环境下的SLAM问题,引入了先验知识来指导环境元素的分类标准。通过充分利用已有的环境知识,我们可以更准确地判断环境中哪些元素是静态的,哪些是动态的。这种先验知识的引入能够有效地提高动态元素的识别和跟踪的准确性。在确定了动态元素之后,可进一步实现了姿态估计和语义图构建。姿态估计是指通过分析传感器数据,推测机器人在环境中的位置和朝向。语义图构建则是利用已知的环境模型和语义分割结果,生成包含语义信息的地图。这些步骤的完成可以为智能机器人在动态环境中的导航和决策提供准确的信息支持。
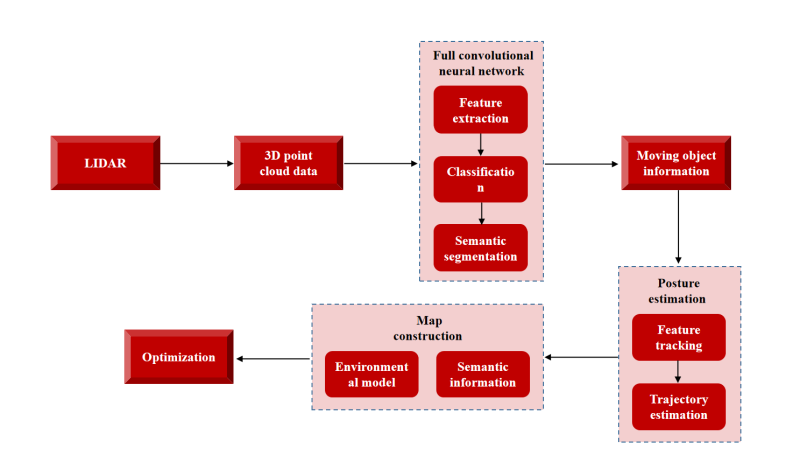
WIMI微美全息研究的基于激光雷达和语义约束的SLAM算法的关键技术模块包括激光雷达数据处理、语义分割、运动和静态物体分离、姿态估计及地图构建等几个方面,这些技术模块相互配合,共同解决了动态环境下SLAM的挑战,提升了对环境感知和自我定位的精确性和可靠性。
激光雷达数据处理:激光雷达是获取环境三维点云数据的重要传感器。在SLAM算法中,对激光雷达数据进行预处理,包括去噪、滤波和特征提取等操作。这些操作旨在提取出有用的特征信息,以便后续的姿态估计和地图构建过程。
语义分割:语义分割是将点云数据中的每个点分配到不同语义类别的任务。通过使用深度学习的方法,如全卷积神经网络(FCN)或注意力机制(Attention Mechanism),可以实现对点云数据的语义分割。语义分割结果能提供有关运动对象的信息,有助于后续的轨迹估计和地图构建过程。
运动和静态物体分离:在动态环境中,需要将动态物体与静态背景分开。这一步骤通常基于语义分割结果和先验知识,通过比较点云数据的运动性质和已知的环境模型,将动态物体和静态背景进行区分。这样可以有效地过滤掉动态物体的影响,提高姿态估计和地图构建的准确性。
姿态估计:姿态估计是通过分析传感器数据,推测机器人在环境中的位置和朝向。基于激光雷达的SLAM算法通常采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)或非线性优化方法来实现姿态估计。语义约束信息可以用于约束姿态估计过程,以提高其准确性和鲁棒性。
地图构建:地图构建是将环境中获取的传感器数据整合成一张三维地图。基于激光雷达的SLAM算法可以通过融合激光雷达数据和语义信息,生成包含语义标签的地图。这样的地图能够提供更多有关环境结构和特征的信息,为智能机器人的导航和决策提供更丰富的上下文。
随着人工智能、5G和物联网等技术的发展,智能机器人在动态环境中的感知与定位问题已经成为一个热门的研究领域。WIMI微美全息布局的基于激光雷达SLAM算法结合了全卷积神经网络和语义分割等技术,能够有效解决动态环境下SLAM的挑战,其具有精确性、鲁棒性、场景理解和实时性等技术优势,它不仅在工业自动化、智能交通和机器人导航等领域具有重要应用前景,还为智能机器人在未来的发展提供了有力支持,使智能机器人在动态环境中将能够实现更高水平的感知、理解和应对能力,为人们的生活带来更多便利和安全。












